





BOH-BCHJ1002型工业焊接机器人实训平台
系统采用真实焊接机器人的设计理念,学生可通过学习实践,深入了解变位机和送丝机的工作原理,并掌握机器人基础知识、基本操作、示教编程、自动焊接等技能,使学生具备机器人焊接岗位和中高级专业人才所必需的基本 知识和基本技能,并为提高学生的全面素质、增强适应现代焊接技能岗位的能力打下良好的基础。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
相关产品

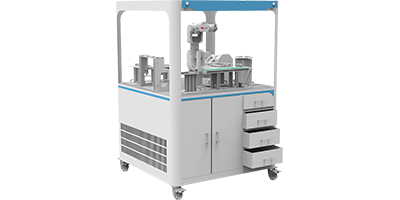
智能产线实训装置是模块化组成自动装配的教学工作站。工作站覆盖了互联控制技术、传动技术、人机交互(HMI)技术、视觉检测技术、机械技术、传感与气动技术及多种工业现场总线通讯技术等多种技术应用。其中,互联控制、人机交互(HMI)技术载体标配国内外一线品牌,其保证了智能实训装置在系统教学过程的稳定性与可靠性。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

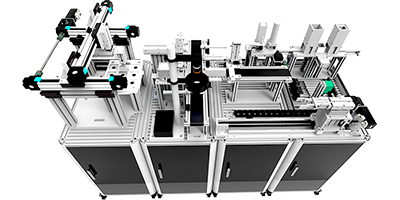
工业机器人综合实训台是模块化工业机器人实训工作站,台面各工作单元均为模块化结构设计,可灵活自由拆装。工作站覆盖了工业机器人应用技术、互联控制技术、传动技术、人机交互(HMI)技术、视觉检测技术、机械技术、传感与气动技术及多种工业现场总线通讯技术等多种技术应用。其中,互联控制、人机交互(HMI)技术载体标配国内外一线品牌,其保证了工业机器人综合实训台在系统教学过程的稳定性与可靠性。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

在数字化转型的时代,掌握工业自动化核心技术已成为工程师必备的技能。我们的PLC实训设备正是为此而生,为培养下一代工业自动化专家提供坚实的基础。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

本透明仿真教学电梯是为了配合大中专院校、技校、职业学校、劳动就业培训中心、电梯维修物业管理部门等有关电梯专业和工业自动化专业课程实验演示,使更多的人能够更好地了解电梯、使用电梯,培养出更多的电梯专业人才,适应电梯行业的发展需要,我公司经过深入探索研究,精心设计的。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

BH-DGT型高性能电工电子电拖实验装置吸收了国内国外先进教学仪器的优点,充分考 虑了实验室的现状和未来的发展趋势,从性能上和结构上进行了创新,采用挂箱式结构,简洁明了,布局合理,使用方便灵活。实验仪表全数字化显示、精度高,对实验中所涉及的电 源、仪器仪表采取可靠保护,同时设置了可靠的人身安全保护体系,该实验装置性能优越, 是各大中专院校实验室建设的最佳选择。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
办公地址:浙江省温州市永嘉县桥下镇新纵教玩具孵化园8栋3单元
销售咨询:13732023530、15858864466、19975218786、13345876015
技术咨询:15058335858
联系电话:4008-269-589、0577-66961670
公司邮箱:bh@boheng.com.cn
一、BOH-BCHJ1002型 工业焊接机器人实训平台系统简介
工业焊接机器人实训平台是在多年机器人教学、实验基础上,结合 当前焊接自动化实际应用和学校工业机器人教学需求开发研制的。系统可作为本科、职 业技术学院、培训机构机器人系统教学培训的操作平台。系统采用真实焊接机器人的设计理念, 学生可通过学习实践,深入了解变位机和送丝机的工作原理,并掌握机器人基础知识、基本操 作、示教编程、自动焊接等技能,使学生具备机器人焊接岗位和中高级专业人才所必需的基本 知识和基本技能,并为提高学生的全面素质、增强适应现代焊接技能岗位的能力打下良好的基 础。
工业焊接机器人实训平台涵盖了工业机器人本体、机器人控制柜及示教器、机器人底座、机器人专用焊机及 送丝机、进口机器人焊枪、示教实验台、工装卡具平台、焊接专用变位机、电气控制系统、气 瓶、空压机等硬件组成,经过多年的实际运用得到了国内普遍认可。
二、系统功能
1、TCP标定
2、轨迹示教
3、焊接参数调节
4、平缝焊接
5、角缝焊接
6、环缝焊接
7、变位机联动
8、手动调试平台
9、变位配合焊接
三、系统优势
1.系统采用主流ABB工业机器人,且ABB公司配套了完善的机器人仿真软件及全部的3D源文 件,学生可通过电脑预先对机器人进行熟悉和练习,以快速掌握工业机器人的系统认知和基本 操作;
2.博创智联与ABB在教育领域深度合作,结合工业实际焊接应用与学校的教学需求,开发了 全套的教学实验、实训资料。教学课程贴近实际应用,贴近一线教学,学生可快速掌握机器人 操作和机器人真实焊接等技能;
3.机器人专用焊机 逆变式MIG/MAG弧焊电源采用恒压焊接模式,全数字控制,适应性极强;界面友好,一元调节方式,易于掌握,可在短时间内快速掌握焊机的参数设置和基本功能应用;
4.焊接专用变位机 变位机使用高精度步进电机,通过PLC与机器人进行通讯,可根据焊接需要进行实时角度调 整,以适应各种焊接角度、各个焊接位置;利用该变位机可焊接多个系列、多种形式、多种材 质的工件,变位机与机器人可灵活配合使得整套焊机系统具备极高的柔性;
5.进口焊枪 稳定性好、额定值高及零部件使用寿命长;*佳的温度特性可确保易损件使用寿命长;坚 固耐用的焊枪结构可实现高碰撞稳定性;
6.轨迹示教平台 示教平台上的每个图案都经过精心设计。轨迹示教由简到难,可使学生充分掌握机器人基 本操作、机器人编程和机器人示教再现等技能,达到边学边练的效果;
7.手动调试平台 针对本焊接教学系统,专门开发了调试平台。使得反复配置焊接系统、调节干伸长度、变 位机运动控制更加方便;
8.轨迹示教平台 防撞传感器是为机器人焊枪专门设计的急停机构,在机器人焊枪与障碍物发生碰撞时,它 能提供可靠的自动停运功能,保护系统和操作人员免于机械损伤,具有较大的弹簧负载和较高 的操作精度;当焊枪与其它物体发生碰撞时,较小的碰撞力就可以触发传感器,减小损伤焊枪 的风险。使得工作站可以更安全的运用在教学当中。
立足于工业实际应用,进行真实焊接。在学习实践中,我们拥有完善的工业机器人教学体 系,每套教学系统均配备了详细的教学实训指南,*大程度的使学生掌握工业机器人应用及自动焊接,还 原各个应用场景,使学生在课堂上就如同在工作实习。
四、平台配置及参数
|
序号 |
项目名称 |
需求条款 |
||
|
1 |
工业机器人教学系统 |
★包括工业机器人本体、工业机器人控制器和工业机器人示教器,以上三部分需同厂家原厂配套,机器人本体和其他单元(如送丝机构、变位机、焊接电源等)配合负责完成焊接及轨迹练习、TCP标定等各项实训内容。所有机器人需符合序号1、2、3中的参数要求。 |
||
|
工业机器人本体 |
★ABB IRB-1410串联工业机器人 |
|||
|
安装方式 |
落地安装 |
|||
|
本体颜色 |
白色 |
|||
|
*大臂展半径 |
★1.44m |
|||
|
防护要求 |
IP30 |
|||
|
轴数 |
★6 |
|||
|
重复定位精度 |
额定负载时≤±0.05mm |
|||
|
特性 |
集成信号源:上臂12路信号 |
|||
|
各轴 |
回转 |
+170°至-170° |
||
|
立臂 |
+70°至-70° |
|||
|
横臂 |
+70° 至-65° |
|||
|
腕 |
+150°至-150° |
|||
|
腕摆 |
+115°至-115° |
|||
|
腕转 |
+300°至-300° |
|||
|
各轴 |
回转 |
105°/s |
||
|
立臂 |
105°/s |
|||
|
横臂 |
105°/s |
|||
|
腕 |
280°/s |
|||
|
腕摆 |
280°/s |
|||
|
腕转 |
280°/s |
|||
|
可搬重量(公斤) |
5kg |
|||
|
附加载荷 |
第1轴:19kg |
|||
|
机器人本体自重(公斤) |
225kg |
|||
|
机器人底座尺寸 |
620mm*450mm |
|||
|
辐射 |
EMC/EMI屏蔽 |
|||
|
环境温度 |
5°C~45°C |
|||
|
*大湿度 |
95% |
|||
|
*大噪音(分贝) |
★≤70dB(A) |
|||
|
TCP*大速度 |
2.1m/s |
|||
|
2 |
紧凑型控制柜 |
尺寸(毫米) |
310 x 449 x 442 mm |
|
|
环境温度 |
0°C ~ 45°C |
|||
|
*大湿度 |
95% |
|||
|
控制硬件 |
多处理器系统 |
|||
|
PCI 总线 |
||||
|
奔腾CPU、大容量闪存 |
||||
|
20sUPS 备份电源 |
||||
|
控制软件 |
BaseWare 机器人操作系统 |
|||
|
编程语言:RAPID |
||||
|
文本格式:PC-DOS |
||||
|
电源 |
单相220V,50-60Hz |
|||
|
额定功率 |
4KVA(变压器容量) |
|||
|
防护等级 |
IP30 |
|||
|
操作面板 |
安装在控制柜上 |
|||
|
编程单元 |
便携式示教器,具备操纵杆和键盘、彩色触摸式显示、具中、英文菜单选项。 |
|||
|
安全性 |
紧急停止,自动模式停止,测试模式停止等 |
|||
|
输入输出 |
数字式直流24V输入输出板 |
|||
|
|
包含模拟量通讯端口 |
|||
|
3 |
示教器 |
图形化彩色触摸屏 |
||
|
操纵杆 |
||||
|
★热插拔,运行时可插拔 |
||||
|
12键薄膜键盘 |
||||
|
支持USB存储器 |
||||
|
防护等级IP54 |
||||
|
紧急停机 |
||||
|
4 |
焊接电源 |
采用IGBT软开关逆变技术,工频三相380V电源输入整流后又IGBT逆变器变为高频电流,经高频变压器降压,高频整流器整流,滤波后输出合适于焊接的直流电。控制电路对整机进行闭环控制,使焊机电源具有良好的抗电网波动能力。 |
||
|
可扩展EtherNetIP、DeviceNet、CAN、CANOPEN、485等通讯接口,采用标准的通讯协议。数字接口能够调用焊机存储的焊接规范。 |
||||
|
参数: |
||||
|
5 |
送丝机 |
尺寸:250*175*205mm |
||
|
光栅反馈式送丝电机,送丝精度高。送丝力强,抗干扰能力强。 |
||||
|
采用阻尼盘轴,制动性好; |
||||
|
机身接口:气管插头、控制插头、进水插头、回水插头、焊机输出、欧式焊枪接头 |
||||
|
送丝机信号端子:电磁阀正负极、送丝机运动正负极、电压反馈端子、防碰撞信号、转速反馈信号、地线端子、气检信号、丝检信号、焊枪开关、两个预留端子 |
||||
|
6 |
焊枪 |
采用欧式接口焊枪 |
||
|
材料: |
||||
|
冷却方式:风冷 |
||||
|
焊枪等级:350A |
||||
|
电缆长度:1.1m |
||||
|
7 |
丝盘轴 |
送丝盘固定于机器人的1号轴上,跟随机器人运动而运动。 |
||
|
尺寸:330*330*160mm |
||||
|
导丝管长度:1.5m |
||||
|
8 |
变位机 |
整体尺寸:360*385*395mm |
||
|
变位机本体上预留焊接反馈线接线端子,以保证电流可通过接线端子传输至焊接工件。 |
||||
|
支架尺寸:1200*680*500mm |
||||
|
9 |
焊接平台 |
平台材料:欧标铝型材 |
||
|
包含焊接工装夹具,工件放置平台。平台预留焊机正极接线柱。 |
||||
|
焊接工装夹具可将焊件准确定位和可靠夹紧,便于工件进行装配和焊接、保证焊件结构精度。 |
||||
|
工件放置在平台被夹紧后保证良好的导电性 |
||||
|
10 |
TCP标定模块 |
可移动式焊枪标定模块,在标定完成后可以随时取走。并有护套对标定工具做保护。 |
||
|
示教锥:尺寸:φ24*65mm |
||||
|
锥套:不锈钢 |
||||
|
11 |
轨迹示教平台 |
平台材料:欧标铝型材 |
||
|
示教台上包含不少于7个图形,学生可利用该平台练习机器人操作,编制基本运动程序。 |
||||
|
尺寸:500*500mm |
||||
|
12 |
调试手柄 |
包含急停按钮、送丝机调试按钮、变位机调试按钮。 |
||
|
13 |
工件 |
材质:碳钢 |
||
|
材质:碳钢 |
||||
|
材质:碳钢 |
||||
|
14 |
可编程控制器 |
电源电压:100~240VAC(-15% ~ 10%),50/60Hz ? 5% |
||
|
15 |
防碰撞传感器 |
承受压力:X、Y轴:80N |
||
|
16 |
★工业机器人教学系统开发平台 |
软著:工业机器人教学系统v1.0 软件开发平台,通过先进的案例式教学模式,通俗易懂的编程控制界面,使用UP-R方法,开发制作适合教学的仿真资源包。 |
||
|
开发平台中需提供教学系统中所有三维图,如操作台、机器人本体、控制柜、示教器、变位机、焊枪等。三维图需按照真实工作站1:1比例绘制。 |
||||
|
平台需支持3D技术,可支持其它3D系统的模型文件导入,且具有平移、旋转、缩放等功能。 |
||||
|
平台中可利用实体模型生成运动轨迹 |
||||
|
平台的资源包中需包含碰撞检测、工业机器人可达性、自动伸展能力等功能 |
||||
|
平台中可实现多种机器人操作模式切换 |
||||
|
提供仿真教学源文件,实现将工业机器人工作站的动作仿真,如搬运、码垛、焊接、打磨、视觉分拣等工艺仿真,并可导出仿真动画,并上传到云端,方便学习使用。 |
||||
|
开标现场需提供仿真教学源文件,及相关3D模型包。 |
||||
|
17 |
★配套课程和教学资源包 |
投标人必须提供本方案中所有配置的工业机器人教学系统的配套课程体系,内容包括教材、教学资源包、课程标准、开课方案、学生技能培养方案等,该教材与本方案中提供的各种机器人实训工作站系统要配套使用,便于教学和实训;该课程体系由必要的理论讲解、工作站实训案例等组成,有完整的课时配备,该课程体系能够和采购人现有人才培养方案对接 |
||






