





BOH-BCF1002型工业机器人教学系统
由机器人工作站和机器人本体构成,机器人本体可根据客户需求,选用ABB和安川两种六轴工业机器人,系统均涵盖工业机器人工作站的搭建、机器人基本操作、机器人示教器的认知、机器人通讯、机器视觉、机器人码垛作业、机器人搬运作业、机器人焊接打磨作业、机器人装配作业、机器人视觉分拣等一系列实际应用技术。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
相关产品

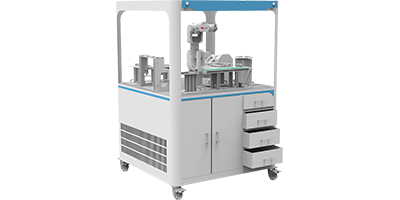
智能产线实训装置是模块化组成自动装配的教学工作站。工作站覆盖了互联控制技术、传动技术、人机交互(HMI)技术、视觉检测技术、机械技术、传感与气动技术及多种工业现场总线通讯技术等多种技术应用。其中,互联控制、人机交互(HMI)技术载体标配国内外一线品牌,其保证了智能实训装置在系统教学过程的稳定性与可靠性。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

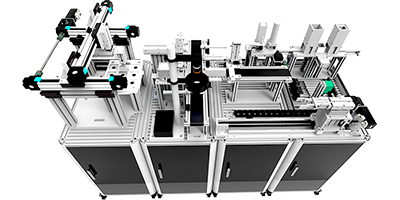
工业机器人综合实训台是模块化工业机器人实训工作站,台面各工作单元均为模块化结构设计,可灵活自由拆装。工作站覆盖了工业机器人应用技术、互联控制技术、传动技术、人机交互(HMI)技术、视觉检测技术、机械技术、传感与气动技术及多种工业现场总线通讯技术等多种技术应用。其中,互联控制、人机交互(HMI)技术载体标配国内外一线品牌,其保证了工业机器人综合实训台在系统教学过程的稳定性与可靠性。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

在数字化转型的时代,掌握工业自动化核心技术已成为工程师必备的技能。我们的PLC实训设备正是为此而生,为培养下一代工业自动化专家提供坚实的基础。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

本透明仿真教学电梯是为了配合大中专院校、技校、职业学校、劳动就业培训中心、电梯维修物业管理部门等有关电梯专业和工业自动化专业课程实验演示,使更多的人能够更好地了解电梯、使用电梯,培养出更多的电梯专业人才,适应电梯行业的发展需要,我公司经过深入探索研究,精心设计的。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

BH-DGT型高性能电工电子电拖实验装置吸收了国内国外先进教学仪器的优点,充分考 虑了实验室的现状和未来的发展趋势,从性能上和结构上进行了创新,采用挂箱式结构,简洁明了,布局合理,使用方便灵活。实验仪表全数字化显示、精度高,对实验中所涉及的电 源、仪器仪表采取可靠保护,同时设置了可靠的人身安全保护体系,该实验装置性能优越, 是各大中专院校实验室建设的最佳选择。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
办公地址:浙江省温州市永嘉县桥下镇新纵教玩具孵化园8栋3单元
销售咨询:13732023530、15858864466、19975218786、13345876015
技术咨询:15058335858
联系电话:4008-269-589、0577-66961670
公司邮箱:bh@boheng.com.cn
一、BOH-BCF1002型 工业机器人教学系统简介
BOH-BCF1002型 工业机器人教学系统是在高校多年机器人教学、实验基础上研制成功的。由机器人工作站和机器人本体构成,机器人本体可根据客户需求,选用ABB和安川两种六轴工业机器人,系统均涵盖工业机器人工作站的搭建、机器人基本操作、机器人示教器的认知、机器人通讯、机器视觉、机器人码垛作业、机器人搬运作业、机器人焊接打磨作业、机器人装配作业、机器人视觉分拣等一系列实际应用技术。可作为高等院校、职业技术学院、职业培训机构机器人系统教学、培训的辅助工具。
二、系统优势
1.BOH-BCF1002型 工业机器人教学系统采用双轴单座变位机,通过工作台的翻转和回转使固定在变位机上的工件实现焊接、装配两种功能。具有高精度、高性价比、结构精巧、安全可控等特点;
2.快换卡具的设计使机器人实现了一机多用的功能(上下料、焊接打磨、码垛、搬运、装配、视觉分拣等),节省了机器人的成本。每个卡具都有两个定位点,从而实现了快换的精确定位;
3.视觉系统采用普通工业数字相机,采用了Labview开发平台,并调用NI的图像工具包进行开发。该方案具有开发周期短,维护较容易等特点可教会学生自己编写代码进行图像采集、图像处理等,完成更多的任务要求,具有更好的灵活性与性价比;
4.拥有完善的工业机器人教学体系,每套教学系统均配备了详细的教学实训指南,该教材由中国电子学会嵌入式系统与机器人分会联合编制;
三、系统组成
BOH-BCF1002型 工业机器人教学系统由工业机器人本体、机器人控制柜及示教器、机器人工作台、上位机、触摸屏、气路系统、空气压缩机、电控系统、视觉系统、变频调速皮带输送机、变位机、分拣平台、码垛平台、快速交换卡具、自动上料系统组成。
四、配置及参数
|
序号 |
项目名称 |
规格参数 |
|
|
1 |
工业机器人教学系统 |
★包括工业机器人本体、工业机器人控制器和工业机器人示教器,以上三部分需同厂家原厂配套,机器人本体和其他单元(如上料机构、变位机、快换系统等)配合负责完成搬运、码垛、装配、模拟焊接、打磨、视觉分拣等各项实训内容。 |
|
|
工业机器人本体 |
★ABB 120 串联工业机器人 |
||
|
安装方式 |
地面、悬挂、倾斜 |
||
|
本体颜色 |
石墨白 |
||
|
*大臂展半径 |
580mm |
||
|
驱动方式 |
交流伺服驱动 |
||
|
防护要求 |
IP30 |
||
|
轴数 |
6 |
||
|
重复定位精度 |
额定负载时≤±0.02mm |
||
|
特性 |
集成信号源手腕设10路信号 |
||
|
各轴操作范围 |
回转 |
+165°至-165° |
|
|
立臂 |
+110°至-110° |
||
|
横臂 |
+70° 至-90° |
||
|
腕 |
+160°至-160° |
||
|
腕摆 |
+120°至-120° |
||
|
腕转 |
+400°至-400° |
||
|
各轴*大速度 |
回转 |
250°/s |
|
|
立臂 |
250°/s |
||
|
横臂 |
250°/s |
||
|
腕 |
320°/s |
||
|
腕摆 |
320°/s |
||
|
腕转 |
420°/s |
||
|
可搬重量(公斤) |
3kg |
||
|
手臂内置接线 |
手臂内置配线≥40 |
||
|
机器人本体自重(公斤) |
25kg |
||
|
机器人底座尺寸 |
180mmX180mm |
||
|
作业温度 |
5°C~45°C |
||
|
*大湿度 |
80%,不得结露 |
||
|
*大噪音(分贝) |
★≤70dB(A) |
||
|
TCP*大速度 |
6.2m/s |
||
|
TCP*大加速度 |
28m/s2 |
||
|
加速时间 |
0.07s(0~1m/s) |
||
|
|
★执行标准 |
1.EN ISO 12100 -1 |
|
|
2 |
紧凑型控制柜 |
型号 |
★ABB IRC5-C |
|
尺寸(毫米) |
449*442*310(mm) |
||
|
环境温度 |
0°C ~ 45°C |
||
|
*大湿度 |
95% |
||
|
控制硬件 |
多处理器系统 |
||
|
PCI 总线 |
|||
|
奔腾CPU、大容量闪存 |
|||
|
20sUPS 备份电源 |
|||
|
控制软件 |
BaseWare 机器人操作系统 |
||
|
编程语言:RAPID |
|||
|
文本格式:PC-DOS |
|||
|
电源 |
单相220V,50-60Hz |
||
|
额定功率 |
4KVA(变压器容量) |
||
|
防护等级 |
IP30 |
||
|
操作面板 |
安装在控制柜上 |
||
|
编程单元 |
便携式示教器,具备操纵杆和键盘、彩色触摸式显示、具中、英文菜单选项。 |
||
|
安全性 |
紧急停止,自动模式停止,测试模式停止等 |
||
|
输入输出 |
数字式直流24V输入输出板 |
||
|
接口 |
★具备PC-Interface接口,可实现机器人与计算机通讯 |
||
|
3 |
示教器 |
图形化彩色触摸屏 |
|
|
操纵杆 |
|||
|
★热插拔,运行时可插拔 |
|||
|
12键薄膜键盘 |
|||
|
支持USB存储器 |
|||
|
防护等级IP54 |
|||
|
紧急停机 |
|||
|
4 |
可移动式操作台 |
工作台需包含触摸屏、上料系统、机器人底座、机器人本体、机器人示教器、变位机系统、快换系统、工件、码垛平台、分拣平台、下料系统、机器视觉系统等 |
|
|
尺寸:1800*1200*900(mm) |
|||
|
材料:铝型材 |
|||
|
夹具支架:铝型材与铝板。尺寸:480*120*312 |
|||
|
码垛平台:铝板。尺寸:300*300*20 |
|||
|
机器人底座:45号钢。尺寸:300*350*20 |
|||
|
相机支架:铝型材及Q235机加件。总高度650mm,臂长350mm |
|||
|
脚轮:底部装有脚轮可以使平台方便移动,同时可以将脚轮底部的固定支撑顶起使脚轮离地以便使平台方便的固定在地面上。 |
|||
|
5 |
供气系统 |
供气系统由气泵、调压阀、空气过滤器、电磁阀、旋钮式调压阀、真空发生器、手阀、压力传感器等构成。 |
|
|
气泵:30L无油静音空压机 |
|||
|
6 |
PLC模块 |
型号:FX3U-48MT |
|
|
7 |
HMI |
显示器:7” TFT |
|
|
8 |
工业机器人底座 |
底座材料45钢镀铬。 |
|
|
采用较重材料,螺栓紧固,保证机器人的运行安全。 |
|||
|
底座尺寸300*350*20 |
|||
|
9 |
快换夹具 |
★采用国际知名品牌 |
|
|
★采用气动元件驱动,重复精度±0.01mm |
|||
|
总体尺寸:480*120*312(mm) |
|||
|
结构件材料铝合金,氧化处理 |
|||
|
★提供4种可夹持工具,包括焊接工具、真空吸盘工具、气动夹持工具及备用机械手 |
|||
|
★可实现快速更换夹持工具 |
|||
|
10 |
变位机模块 |
★采用双轴单座变位机,可通过变位机实现焊接、打磨和装配功能 |
|
|
★通过变位机的回转和翻转,对固定在变位机底座上的工件进行模拟焊接 |
|||
|
★通过机器人与变位机的配合,将工件装配到变位机底座上 |
|||
|
★重复定位精度:0.02 mm |
|||
|
材料:铝合金、镀锌钢板及不锈钢材料 |
|||
|
尺寸:290*200*310(mm) |
|||
|
11 |
工件 |
焊接工件:铝桶 |
|
|
码垛工件:亚克力块(分黑、红、蓝三种颜色) |
|||
|
分拣工件:亚克力块(按颜色进行分拣) |
|||
|
搬运工件:铝桶(气动夹爪夹持搬运) |
|||
|
打磨工件:铝桶 |
|||
|
装配工件:铝桶(由机器人气动夹具夹持将铝桶安装到变位机上) |
|||
|
12 |
TCP标定尖锥 |
不锈钢 |
|
|
功能:机器人工具中心点定位 |
|||
|
尺寸:φ12*45mm |
|||
|
13 |
上料模块 |
尺寸:235*150*227(mm) |
|
|
材质:不锈钢、铝合金 |
|||
|
驱动形式:气压传动 |
|||
|
功能:能准确的将材料推送致上料传送带 |
|||
|
14 |
下料模块 |
包含物料导槽,导槽定位板等 |
|
|
由气动真空吸盘从物料导槽中吸取实现下料 |
|||
|
材质:亚克力、不锈钢板 |
|||
|
尺寸:280*350*10(mm) |
|||
|
15 |
输送系统 |
尺寸:1500*280*80(mm) |
|
|
用4080线体专用铝型材做框架,普通输送带传送,输送带宽度200mm。电机采用220V 60W减速电机配链轮传动,调速器调速,速度在0-20m/min 之间连续可调。 |
|||
|
16 |
码垛模块 |
★包含自动上料装置,采用TR型双轴气缸驱动,缸径10mm,行程80mm。该气缸导向性能好,使机构简单运行可靠。 |
|
|
★真空吸附装置,包括快换、吸盘支架及真空吸盘。可以从传送带上吸取亚克力材料并搬运到码垛板上进行码垛。 |
|||
|
码垛板为铝合金材料,在码垛板上亚克力块可按照预先设定的程序进行码垛 |
|||
|
码垛平台即为铝合金码垛板 |
|||
|
17 |
搬运模块 |
工件数量:4个 |
|
|
工件尺寸:φ87*101 |
|||
|
工件材料:铝合金 |
|||
|
卡具:四爪手指气缸及相关连接夹具。 |
|||
|
18 |
模拟焊接模块 |
夹具:铝制基座,不锈钢焊枪 |
|
|
★功能:与变位机配合实现模拟焊接 |
|||
|
19 |
模拟打磨模块 |
夹具:铝制基座,不锈钢焊枪 |
|
|
★用类似磨头的工具沿工件内倒角和外倒角模拟打磨操作 |
|||
|
20 |
装配模块 |
★将工件装配到变位机底座上(需将工件通过螺纹固定在变位机底座上) |
|
|
材料:铝合金 |
|||
|
21 |
★视觉分拣模块 |
由上料模块、输送系统、支架、视觉系统和下料模块组成。 |
|
|
自动上料装置,采用TR型双轴气缸驱动,缸径10mm,行程80mm。该气缸导向性能好,使机构简单运行可靠。 |
|||
|
输送系统,可实现物料传送。尺寸:1500*280*80 |
|||
|
由普通数字工业相机进行图像采集,需有开发平台,并可以用图形化语言进行二次开发,进行图像处理识别工件,可实现机器人与PC通讯,将数据输出给机器人,机器人抓取工件完成分拣 |
|||
|
相机要求:130万像素、帧率60fps、接口Gige、带外部触发、彩色相机 |
|||
|
22 |
★工业机器人教学系统开发平台 |
软著:工业机器人教学系统v1.0 软件开发平台,通过先进的案例式教学模式,通俗易懂的编程控制界面,开发制作适合教学的仿真资源包。 |
|
|
开发平台中需提供教学系统中所有三维图,如操作台、机器人本体、控制柜、示教器、上下料模块、变位机、快换夹具、输送系统、视觉系统、供气系统、工件、HMI等。所有三维图需按照真实工作站1:1绘制。 |
|||
|
平台需支持3D技术,可支持其它3D系统的模型文件导入,且具有平移、旋转、缩放等功能。 |
|||
|
平台中可利用实体模型生成运动轨迹 |
|||
|
平台的资源包中需包含碰撞检测、工业机器人可达性、自动伸展能力等功能 |
|||
|
平台中可实现多种机器人操作模式切换 |
|||
|
提供仿真教学源文件,实现将工业机器人工作站的动作仿真,如搬运、码垛、焊接、打磨、视觉分拣等工艺仿真,并可导出仿真动画,方便学习使用。 |
|||
|
开标现场需提供仿真教学源文件,及相关3D模型包。 |
|||
|
23 |
★配套课程和教学资源包 |
投标人提供本方案中所有配置的工业机器人教学系统的配套课程体系,内容包括教材、教学资源包、课程标准、开课方案、学生技能培养方案等,该教材与本方案中提供的各种机器人实训工作站系统要配套使用,便于教学和实训;该课程体系由必要的理论讲解、工作站实训案例等组成,有完整的课时配备,该课程体系能够和采购人现有人才培养方案对接 |
|
|
24 |
计算机(选配) |
用于与机器人进行通讯和视觉的二次开发 |
|
|
配置要求: |
|||
|
25 |
|
由标定板、料盘、工件、相机支架、标准模块中的视觉系统和下料模块组成。 |
|
|
26 |
大赛轨迹板模块(选配) |
尺寸:250X250X50 材料:尼龙、铝合金 |
|
|
由直线、圆弧组成狭缝型轨迹 |
|||
|
机器手夹持软金属线 |
|||
|
由示教人员操作金属线在狭缝中模仿轨迹运动 |
|||
|
27 |
配套课本及 |
《工业机器人程序设计与实践》 |
|






