





相关产品

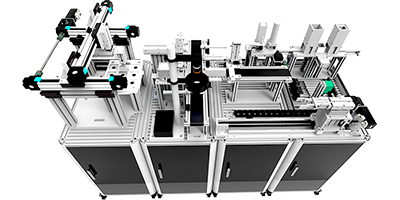
智能产线实训装置是模块化组成自动装配的教学工作站。工作站覆盖了互联控制技术、传动技术、人机交互(HMI)技术、视觉检测技术、机械技术、传感与气动技术及多种工业现场总线通讯技术等多种技术应用。其中,互联控制、人机交互(HMI)技术载体标配国内外一线品牌,其保证了智能实训装置在系统教学过程的稳定性与可靠性。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

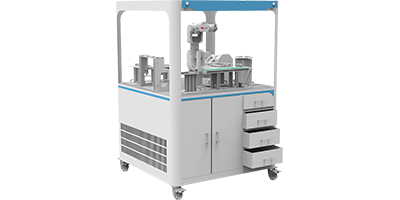
工业机器人综合实训台是模块化工业机器人实训工作站,台面各工作单元均为模块化结构设计,可灵活自由拆装。工作站覆盖了工业机器人应用技术、互联控制技术、传动技术、人机交互(HMI)技术、视觉检测技术、机械技术、传感与气动技术及多种工业现场总线通讯技术等多种技术应用。其中,互联控制、人机交互(HMI)技术载体标配国内外一线品牌,其保证了工业机器人综合实训台在系统教学过程的稳定性与可靠性。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

在数字化转型的时代,掌握工业自动化核心技术已成为工程师必备的技能。我们的PLC实训设备正是为此而生,为培养下一代工业自动化专家提供坚实的基础。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

本透明仿真教学电梯是为了配合大中专院校、技校、职业学校、劳动就业培训中心、电梯维修物业管理部门等有关电梯专业和工业自动化专业课程实验演示,使更多的人能够更好地了解电梯、使用电梯,培养出更多的电梯专业人才,适应电梯行业的发展需要,我公司经过深入探索研究,精心设计的。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员

BH-DGT型高性能电工电子电拖实验装置吸收了国内国外先进教学仪器的优点,充分考 虑了实验室的现状和未来的发展趋势,从性能上和结构上进行了创新,采用挂箱式结构,简洁明了,布局合理,使用方便灵活。实验仪表全数字化显示、精度高,对实验中所涉及的电 源、仪器仪表采取可靠保护,同时设置了可靠的人身安全保护体系,该实验装置性能优越, 是各大中专院校实验室建设的最佳选择。
品牌:博恒BHENLAB
制造商:浙江博恒教学设备有限公司
产地:浙江
定制:可定制(包含外观、参数、配置)
质保期:一年(非人为故意、暴力损坏)
价格:联系销售人员
办公地址:浙江省温州市永嘉县桥下镇新纵教玩具孵化园8栋3单元
销售咨询:13732023530、15858864466、19975218786、13345876015
技术咨询:15058335858
联系电话:4008-269-589、0577-66961670
公司邮箱:bh@boheng.com.cn
一、工业机器人技术要求
工业机械手工作半径:≥580mm;
负载:3公斤
运动轴数:6
重复精度:±0.01mm
自重:225kg
TCP最大速度:6.2 m/s
TCP最大加速度:28m/s²
轴运动参数
运动范围运动速度
轴1 -170°~+170°120°/s
轴2 -70°~+70°120°/s
轴3 -70°~+65°120°/s
轴4 -150°~+150°280°/s
轴5 -115°~+115°280°/s
轴6 -300°~+300°280°/s
控制柜
性能参数
电气连接:220/230 V,50-60 Hz
防护等级:IP45
环境参数环境温度:0-45°C
相对湿度:最高95%(无凝露)
尺寸(高×宽×深,重量):约310×449×442 mm,30 kg
二、各模块参数指标
1、实训单元至少包含以下模块
(1)出入库平台:
1.主要负责完成仓储物料的出入库传输;
2.结构类型:工业铝型材结
(2)单工位冲压成型系统:
1.主要由冲压机构成,负责完成原材料的冲压成型;
2.包含冲压模具及成型模腔组成,可根据任务需求自由完成冲压图形的实训;
3.脱模顶升行程≤50mm;
(3)传输线系统:
1.主要负责整体系统的物流传输与工艺衔接;
2.需满足不少于横向传输与纵向传输功能;
3.结构类型:工业铝型材结构;
4.传输方式:皮带传输或同步带传输;
5.传输速度:≥1.0m/min;
(4)质量检测系统:由检测装置等组成;
(5)仓储系统:
1.仓储系统主要负责完成的出入库作业,实现存取自动化;
2.仓位数量:2*6,共12仓位;
3.工业铝型材结构;
三、可实训项目
机器人安全操作注意事项
机器人开关机的操作
机器人控制面板菜单的介绍
机器人设定系统的日期与时间
机器人系统状态信息及事件日志查看
机器人系统的备份与恢复
机器人的手动操纵——单轴运动
机器人的手动操纵——线性运动
机器人的手动操纵——重定位运动
机器人手动操纵的快捷方式
机器人转数计数器的更新操作
机器人IO通讯及标准通讯板的认识
机器人标准IO板的参数设定
机器人系统输入输出与IO信号的关联
机器人示教器可编程按钮的使用
机器人三个重要程序数据
机器人的RAPID程序指令
机器人创建程序模块及例行程序的方法
机器人例行程序编程操作方法
机器人RAPID程序的绝对位置指令
机器人RAPID程序的关节移动指令
机器人RAPID程序的圆周指令
机器人RAPID程序的直线指令
机器人RAPID程序的赋值指令
机器人RAPID程序的IO指令
机器人RAPID程序的逻辑判断指令
机器人RAPID程序的中断应用
机器人的安全保护机制






